GEM5 设计与实现分析¶
一次ppt汇报
前言¶
gem5是一款可以实现时钟精确仿真的SOC模拟器。它本身的目的并不是帮助产品开发,它更偏向于教育和架构探索。 但是研究它仍然是有意义的,它的意义在于能够让你学习到一款时钟级模拟器的构建思路。
官网:[http://www.gem5.org] 学习指导:[http://www.gem5.org/documentation/learning_gem5/introduction] 相关资料:[http://daystrom.m5sim.org/Main_Page]
分析点¶
- 单元的设计思路
- 如何解决寄存器冲突
- 流水线的实现方式
- 时钟如何统一
- 多核设计
- 总线,端口的抽象
- debug如何支持
- 地址映射的处理方法
简介¶
gem5是一个模块化的计算机系统(computer-system)模拟器,它结合了M5(多处理器模拟器)和GEMS(存储层次模拟器)中最优秀的部分,最初用于计算机架构以及微处理器架构探索,当然在研究行业,教学行业也有推广。 但总体来讲,gem5是偏向于学术的一款模块化模拟器平台。 gem5目前还在发展,支持的CPU类型有:Alpha, ARM, MIPS, Power, SPARC, RISC-V 以及 64 bit x86。
如上是对于gem5官网描述的概括,其中最关键的应该就是模块化。gem5可以做到时钟精确,当然也可以利用它的模块化,忽略掉一些模块的latency。本文主要侧重的是RISC-V架构。对于RISC-V, 目前gem5主线还不支持vector扩展,但amf扩展都已经支持。
gem5能够模拟出一块具体的板卡,包含由各个模块组成的SOC、DDR以及部分外设的具体板卡,但它模拟的核心仍在于SOC内部。
gem5也能运行linux系统
理解gem5的模块化¶
linux系统提供了设备树,让开发者通过组合系统硬件的一系列模块,从而匹配自己的板卡。gem5也是一样的,它有很多模块都有多种实现,你可以指定具体的某一种实现来组合出你想模拟的系统。
gem5的核心内容(各个模块和机制的具体实现)使用c++编写,内部集成了python2.7解析器。这些模块实现完成之后就像linux内核中实现的一个个device,比如:cpu,cache,memory,power,process,tlb等等。python解析器会解析外部输入的配置文件(python脚本),这个脚本就像设备树一样,描述了整个系统是如何由这些device组合起来的,并且定义了这些device的一些必不可少的参数。在系统初始化的时候,根据配置文件的描述,对相应的c++类进行实例化,这样就实现了一个具体的系统。
有些模块是通过静态编译绑定系统的,有些模块是通过解析配置脚本动态绑定的。比如ARCH相关的就是通过静态编译绑定的,在编译的时候我们需要指定要编译的ARCH,而cpu类型我们可以在 配置脚本中指定。
当然了,就像乐高玩具一样,空有一堆零件,没有图纸,也很难做出来像样的玩具(天才可能除外)。如果让我们从0开始组合这些模块,是很困难的一件事情,但好在gem5提供了一些demo的config文件,并且tests中也提供了一些config文件,我们可以模改这些文件实现自己的系统。
社区正在开发基于图形拖拽就能生成config文件的功能,这会使它的config文件写起来更直观。
理解gem5事件机制¶
gem5的运行是靠事件机制来完成的,事件按照tick和优先级进行排序,同一tick和优先级的事件被称为“InBin”, 按照栈的方式来管理 事件管理的核心代码在src/sim/eventq.cc及eventq.hh中
Event及EventQueue是核心的数据结构,显然,Event实现了对事件的抽象,EventQueue实现了对事件的封装和管理
class Event : public EventBase, public Serializable
{
friend class EventQueue;
private:
Event *nextBin;
Event *nextInBin;
Tick _when; //!< timestamp when event should be processed
Priority _priority; //!< event priority
}
class EventQueue
{
private:
Event *head;
Tick _curTick;
}
上述代码罗列了Event的几个重要字段,其中nextBin指向下一个Event,并且下一个Event一定与当前Event的in bin不同(不同when或者不同priority)。 nextInBin是指向下一个同when同priority的Event, nextInBin这个链表被作为栈的逻辑来管理。 上述两点都是由Event的插入策略(insertBefore)决定的。 EventQueue保存了Event链表的表头,这是遍历的起点,_curTick保存了当前的周期时间,这个时间总是被设置为head的_when,这是在执行的时候决定的。
显然,EventQueue保存了一个事件队列,这个队列是一个单向链表,使用nextBin指针指向下一个Event,以_when+_priority的方式进行插入。 同时,这个单向链表中的每一个Event都是当前相同_when + _priority的Event的栈顶,每插入一个相同_when + _priority的Event,当前这个Event就会被压栈,使用nextInBin进行管理,新的Event替代原有Event的位置,这是插入方法insertBefore决定的。
Event *
Event::insertBefore(Event *event, Event *curr)
{
// Either way, event will be the top element in the 'in bin' list
// which is the pointer we need in order to look into the list, so
// we need to insert that into the bin list.
if (!curr || *event < *curr) {
// Insert the event before the current list since it is in the future.
event->nextBin = curr;
event->nextInBin = NULL;
} else {
// Since we're on the correct list, we need to point to the next list
event->nextBin = curr->nextBin; // curr->nextBin can now become stale
// Insert event at the top of the stack
event->nextInBin = curr;
}
return event;
}
insertBefore负责插入待执行的事件,一般由schedule触发。
serviceOne负责执行当前EventQueue中的一个事件,为了更方便理解,下面的代码做了一些删减。 我们可以看到,每次都是执行头节点,而且如果当前头节点有相同_when + _priority的事件,那么按照 出栈的顺序依次执行事件,直到当前相同_when + _priority执行完成后,再通过setCurTick(event->when())来 修改当前系统的时间,最终event->process()执行Event回调函数。
Event *
EventQueue::serviceOne()
{
Event *event = head;
Event *next = head->nextInBin;
if (next) {
// update the next bin pointer since it could be stale
next->nextBin = head->nextBin;
// pop the stack
head = next;
} else {
// this was the only element on the 'in bin' list, so get rid of
// the 'in bin' list and point to the next bin list
head = head->nextBin;
}
setCurTick(event->when());
event->process();
event->release();
return NULL;
}
从总入口上看来,整个事件机制的运行就是在一个大while循环中,不断调用eventQueue的serviceOne
doSimLoop(EventQueue *eventq)
{
while (1) {
Event *exit_event = eventq->serviceOne();
if (exit_event != NULL) {
return exit_event;
}
}
}
TimeBuffer 机制¶
机制介绍¶
TimeBuffer是gem5实现的一个循环buffer,这个循环buffer可以按照tick来推进,每advance()一次,buffer的指针就前进一个。 TimeBuffer通过模板参数可以用来存放任何想要存放的数据,特别适合在流水前后传递数据,能够体现出流水的延时。
TimeBuffer提供了一个past和future的概念。
| past/future | past2 | past1 | past0 | current | future0 | future1 |
|---|---|---|---|---|---|---|
| data | 0 | 1 | 2 | 3 | 4 | 5 |
| index | 0 | 1 | 2 | 3 | 4 | 5 |
从时间(tick)的角度,基于当前,往前推,有多个tick的延迟,就可以设置past值为多少。比如当前是fetch阶段,下一阶段为decode阶段,指令从fetch流到decode需要一个tick,那么就需要至少设置past为1。同理future。
循环buffer会从future0开始被刷新,随着每次advance(), 从future0开始,data中的数据会被析构并重新构造。与此同时,内部名为base的数据指针也会循环增加。
假设我们实例了一个TimeBuffer, past=3, future=3,那么随着tick的进行,大致会有如下的关系
TimeBuffer 提供了wire来实现对Buffer数据的间接访问。在实现这个访问接口的时候,需要提供一个index,这个index是一个tick的概念。比如我们实例两个wire,wire0的index为0, wire1的index为-2, 那么就意味着wire0改写的buffer单元在两个tick之后,wire1才能访问到。
| tick | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|---|
| base | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 0 | 1 | 2 |
| ptr | 4 | 5 | 6 | 0 | 1 | 2 | 3 | 4 | 5 | |
| wire0 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 0 | 1 | 2 |
| wire1 | 5 | 6 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 0 |
如上图所示,在tick0时,wire0可以访问data0, wire1可以访问data5。当t系统tick走到1时,调用advance(), 此时TimeBuffer内部指针base变为1, TimeBuffer重构了ptr所指向的data4(ptr = future + base),此时wire0能够访问data1, wire1能够访问data6。
加入在tick2, wire0更新了data2, 那么在tick4, wire1才能拿到更新后的data2, 体现出了延迟2个tick。
代码分析¶
template <class T>
class TimeBuffer
{
protected:
int past;
int future;
unsigned size;
char *data;
std::vector<char *> index;
unsigned base;
public:
TimeBuffer(int p, int f)
: past(p), future(f), size(past + future + 1),
data(new char[size * sizeof(T)]), index(size), base(0)
{
assert(past >= 0 && future >= 0);
char *ptr = data;
for (unsigned i = 0; i < size; i++) {
index[i] = ptr;
std::memset(ptr, 0, sizeof(T));
new (ptr) T;
ptr += sizeof(T);
}
}
TimeBuffer通过new char[size * sizeof(T)]一次性的为所有元素开辟存储空间。通过palcement new来实现在已经开辟的空间上对buffer对象的构造。同时,为了访问的方便,提供了一个index的指针向量指向buffer中的每一个元素。
void
advance()
{
if (++base >= size)
base = 0;
int ptr = base + future;
if (ptr >= (int)size)
ptr -= size;
(reinterpret_cast<T *>(index[ptr]))->~T();
std::memset(index[ptr], 0, sizeof(T));
new (index[ptr]) T;
}
每次advance都去更新base, base通过size控制来实现循环,进而实现循环buffer。每次advance都会析构并重构当前base对应的future数据。
class wire
{
TimeBuffer<T> *buffer;
int index;
wire(TimeBuffer<T> *buf, int i)
: buffer(buf), index(i)
{ }
T &operator*() const { return *buffer->access(index); }
T *operator->() const { return buffer->access(index); }
}
class TimeBuffer
{
inline int calculateVectorIndex(int idx) const
{
int vector_index = idx + base;
if (vector_index >= (int)size) {
vector_index -= size;
} else if (vector_index < 0) {
vector_index += size;
}
return vector_index;
}
T *access(int idx)
{
int vector_index = calculateVectorIndex(idx);
return reinterpret_cast<T *>(index[vector_index]);
}
}
wire通过不同的index来实现对timebuffer中不同的元素的访问,其中calculateVectorIndex仍然是为了实现循环buffer。当然,wire的字段index的命名容易引发歧义,或许可以用一个更不容易混淆的名字。
TimerBuffer总结¶
尽管TimeBuffer的核心是一个固定的数组,数据在buffer中实际上是不动的。但它通过base及一些辅助计数,实现了一个类似队列的功能,而且,数据移出队列就会消失。 我们可以认为其中的数据是按照tick进行流动的,而且通过wire访问的方式,实现了信号传递及数据流动的延迟。
misc¶
gem5能够模拟一块板卡
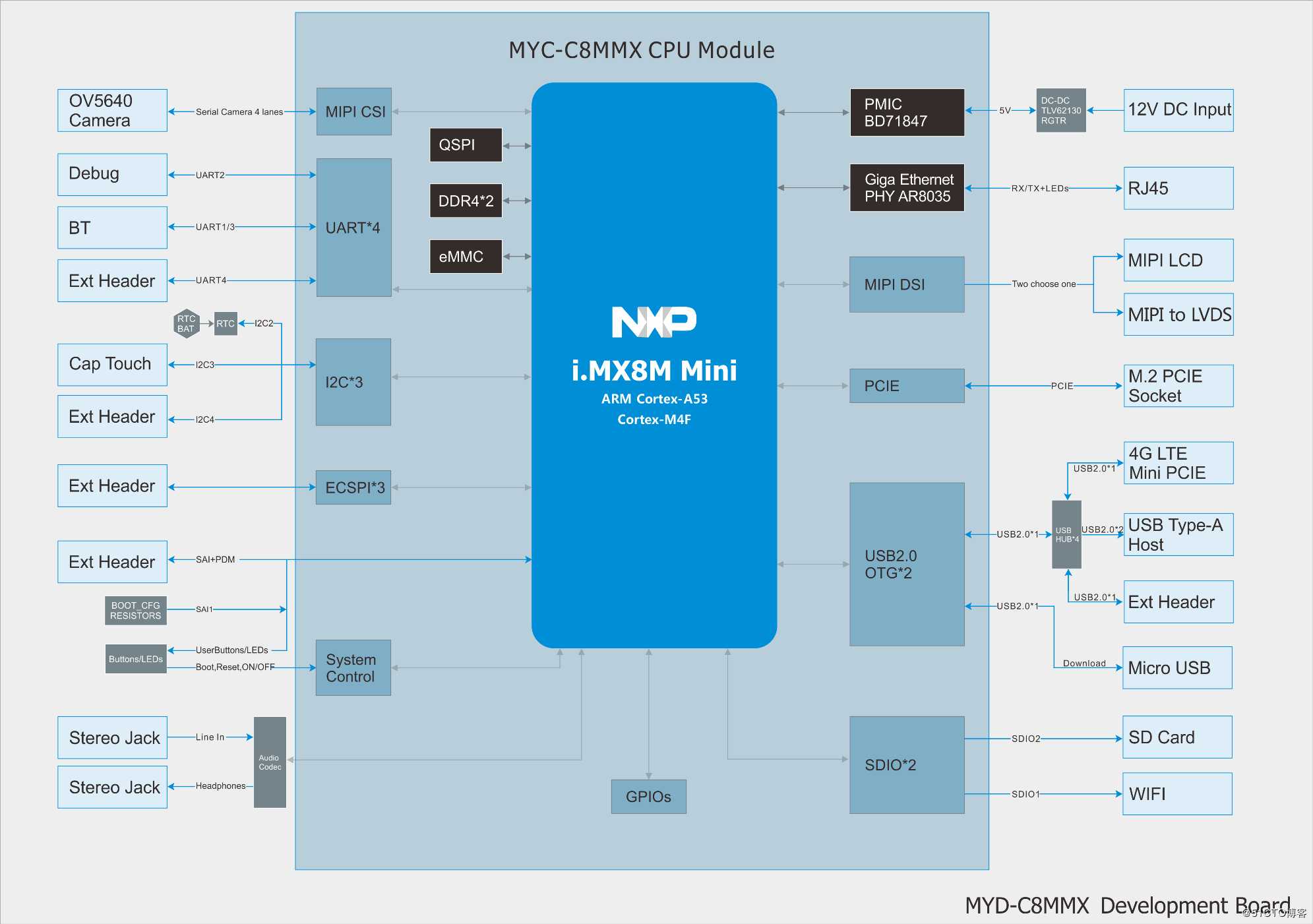 上图是一个较为复杂的开发板系统框图,从图中可以看到,soc通过它的外部接口连接了板上的各个外设。比如通过DDR4接口连接外部DDR,通过PCIE接口连接外部PCIE设备,通过USB接口链接4G模块等等。
上图是一个较为复杂的开发板系统框图,从图中可以看到,soc通过它的外部接口连接了板上的各个外设。比如通过DDR4接口连接外部DDR,通过PCIE接口连接外部PCIE设备,通过USB接口链接4G模块等等。
gem5能够模拟出类似上图的一块板卡,包括SOC以及部分外设。但是,有两点需要注意
- gem5的核心任务还是模拟SOC内部行为,目前实现的外设比较少
- gem5的外设功能是在控制器侧做的。
假如我们要做一个模拟器,要实现SOC访问外部TMP75温度传感器的模拟。假如我们的重点是在SOC内部,那我们可能会想着去实现这个TMP75传感器,并且实现这个总线连接。
但这样存在的问题是,会让实现很复杂,同时会让工作的重心从CPU转到了外设上,已经脱离了作为一款CPU模拟器最核心的东西。这很没有性价比。gem5的实现是在控制器上做文章,比如同样要实现通过I2C访问TMP75传感器,它会直接在I2C控制器上实现TMP75传感器的功能,并且只需要设置好数据返回的latency,就完全可以实现这个过程的模拟,并且保证一定的时钟精确。(当然这个例子在gem5中没有实现)
gem5的内存系统支持DDR,同样的,gem5在DDR控制器上做文章,只需要设置DDR控制器的一些Latency参数,就可以在DDR访问的性能方面做到类似真实的DDR,而不需要真实的去模拟出来一个DDR芯片并且再设计DDR总线连接SOC和DDR芯片。
参考gem5官网的文档,大致有下面几个核心机制需要理解
- gem5是基于事件驱动模型而设计的,那么事件驱动模型是如何实现与运行的?
- 大多数模块的基类都是SimObject,gem5是如何管理这些SimObject的,这些SimObject又是如何组成系统的?
- gem5的isa实现可以理解为自创了一套语法,并且实现了isa_parser的解析器。解析器解析固定语法的ias描述文件,生成isa实现的c++代码,并参与编译。
- gem5如何实现内存系统
上述这些,都可以在gem5官网中找到蛛丝马迹。 但换一个角度,从更高的层面来看gem5。gem5是如何抽象板卡(board), soc, cpu子系统的? 似乎这个问题在官网中并无法直接找到答案,然而这恰恰是我认为理解gem5最重要的部分。 对于上面提到的几点,我们稍后再分析。首先我们**站在gem5设计者的角度,分别从board,soc,cpu微架构三个层面来理解它的设计**
从board层面理解gem5¶
从soc层面理解gem5¶
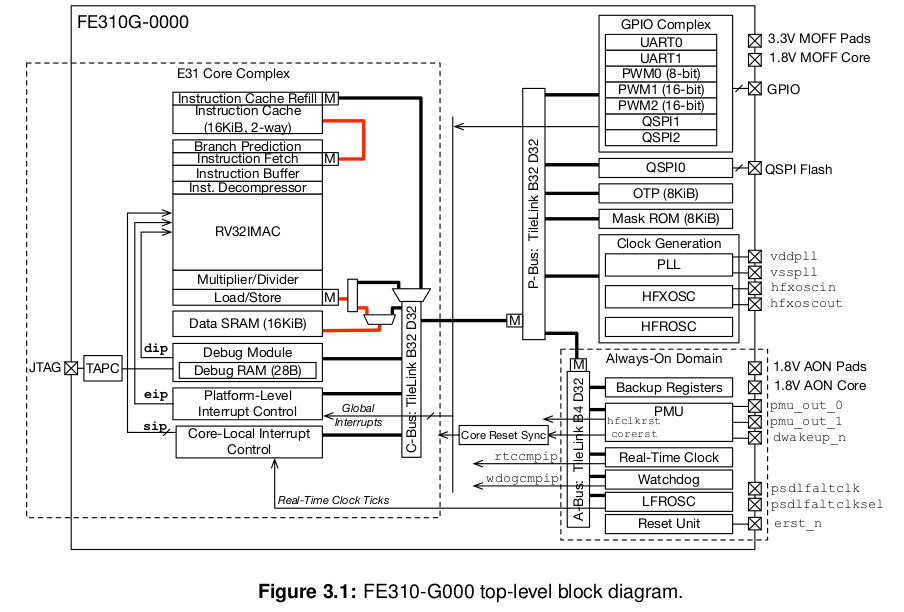 上图是SiFive的RISCV架构FE310_G000 SOC,可以看到它有一个E31核,虚线框是核内微架构,它是一个比较简单的MCU核。
E31核通过P-Bus总线连接一些外设控制器。理论上,使用gem5可以实现一个与上图几乎一样的SOC模型。
上图是SiFive的RISCV架构FE310_G000 SOC,可以看到它有一个E31核,虚线框是核内微架构,它是一个比较简单的MCU核。
E31核通过P-Bus总线连接一些外设控制器。理论上,使用gem5可以实现一个与上图几乎一样的SOC模型。
不关注CPU内部微架构,从大的模块上来讲,我们需要实现CPU核,总线,外设控制器。并且让他们能够连接起来组成一个SOC。那么gem5是如何实现这些的呢?
 上图是通过graphviz依据config.ini文件生成的一个简单系统框图,它足以说明gem5的设计思路。
system抽象了整个SOC系统,system中包含一系列的基于SimObject的模块,当然root和system本身也是一个SimObject。DerivO3CPU, membus, memctrl这三大模块都是SimObject。涉及到数据传输的模块都有port,分为master和slave两种类型,master和slave可以进行连接。从而使得模块相连。
上图是通过graphviz依据config.ini文件生成的一个简单系统框图,它足以说明gem5的设计思路。
system抽象了整个SOC系统,system中包含一系列的基于SimObject的模块,当然root和system本身也是一个SimObject。DerivO3CPU, membus, memctrl这三大模块都是SimObject。涉及到数据传输的模块都有port,分为master和slave两种类型,master和slave可以进行连接。从而使得模块相连。
要想将这种连接方式做的通用,就需要把port设计的通用
从cpu微架构层面理解gem5¶
事件驱动模型¶
simobject¶
isa定制语法¶
内存系统¶
memory & port¶
所有内存对象都是通过port连接起来的,port实现了三种不同的内存模式
- atomic
- timing
- functional
timing模式是唯一一个能产生正确的仿真结果的模式; atomic模式是一个快速仿真模式; functional模式是一个debug模式,支持从host端读入内存数据
port包含master ports 和 slave ports两种,port传递的是packets,
Python与C++的参数传递¶
gem5官网Documentation的作者认为,gem5的python接口的亮点在于能够向C++传递参数。(tvm也能够实现C++与Python的数据互传,这一点我觉得可以对比着分析两者的实现)
添加参数的方法¶
- 在src的.py文件中添加python参数的定义,这个参数可以在config文件中赋值
- 在src的.cc文件中,在类中添加参数字段
- 在src的.cc文件中,在类的构造函数中添加参数字段的赋值,参数由python传入
- 在config文件中添加必要的参数赋值
添加简单SimObject¶
- 在src目录中添加demo.py, demo.cc, demo.hh
- 在demo.py中添加Demo类
- 在demo.hh中添加Demo类
- 在demo.cc中添加Demo类构造函数,必要方法,构造函数需要有默认参数DemoParams
- 在src目录下的Sconscript中添加文件编译和必要的debug flag
- 在config文件中使用新添加的Demo实例
添加event¶
- 添加EventFunctionWrapper类型的event字段到Demo类中
- 添加processEvent 方法用来做event回调函数
- 在构造函数中,初始化event为processEvent
- 创建startup方法,在该方法中添加event的schedule,用于在启动时触发event
关于编译¶
gem5使用Scons来组织编译,Scons类似于make。 Scons需要使用名为SConstruct的文件来组织编译, Scons还提供了一系列的API,用于在SConstruct中方便的定制构建规则。 我们可以认为,Scons是make的升级版,它能更简单,更容易的实现make实现的功能,Scons使用Python脚本来组织构建,有良好的跨平台性。
O3 CPU的ROB模块分析¶
ROB作用机制¶
在乱序CPU中,指令在流水线中执行的时候是乱序的。但从程序员的角度,是不允许这种乱序发生的,在程序员看来,指令一定要顺序的执行。因此产生了ROB模块,ROB使得在流水线中乱序执行的指令在程序员看来是顺序的,即将乱序的指令结果“重排序”。
显然,ROB模块必须有一个指令顺序的记录功能,在乱序执行之前应该做顺序记录,乱序执行后,应该按照记录的顺序完成指令的最终提交。只有这样,才能保证在程序员看来,指令仍然是顺序执行的。
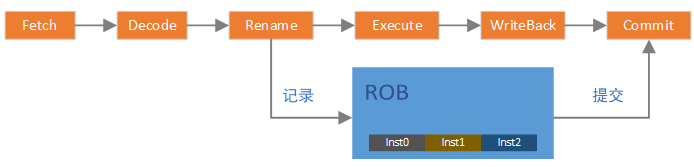
如上图,在乱序CPU的pipeline中,Rename及以前的流水都可以认为是顺序的,尽管它实际上可以在一个周期处理多条指令,但多条仍然是顺序的。但在Execute阶段就开始乱序了,所以,要在Rename之后,将指令顺序记录在ROB中。WriteBack阶段完成后,我们基本可以认为指令已经执行完成,那么在Commit阶段,就需要按照ROB中记录的指令的顺序来提交指令,这样就既加速了指令的运行,提高了流水线的利用率,又保证指令的顺序是正确的。 在gem5的实现中,是在commit的代码中将指令添加到ROB,乍看起来有些费解,但实际上仍然是基于Rename传递的指令队列,对整体效果没有影响
ROB代码结构分析¶
ROB的实现支持多硬线程(代码中应该把硬线程做抽象)。从硬件线程的角度来分析,ROB结构就比较好理解
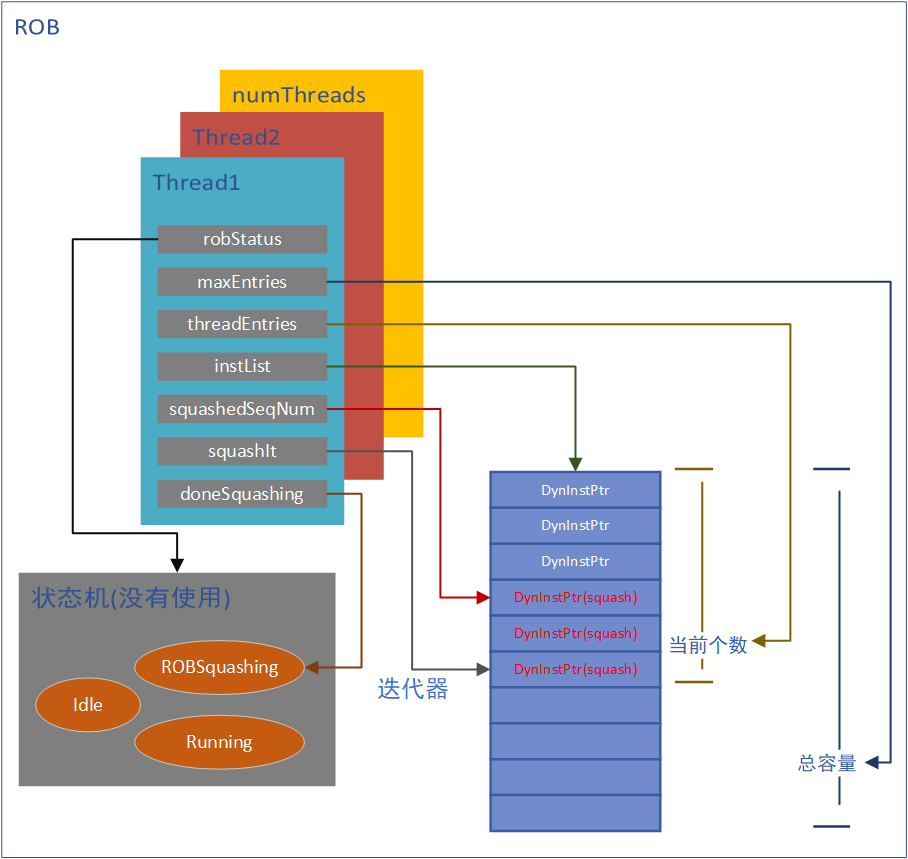
代码实现的核心是对list\
ROB操作¶
ROB的代码实质是双向链表,对于ROB的操作,全部在Commit代码中完成,但这并不意味着它硬件对ROB的操作都是在Commit阶段完成的。软件只需要保证最终效果基本一致即可。这是模拟器实现和真实硬件逻辑的区别
指令加入ROB¶
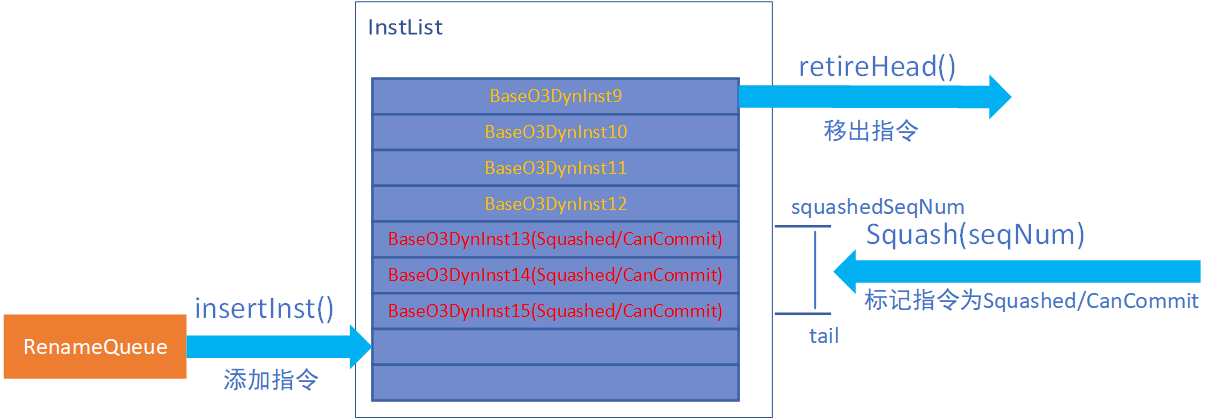
如上图所示,ROB指令来源为Rename之后的指令,gem5中实现为一个名为RenameQueue的TimeBuffer,并且默认Rename的下一个tick即可拿到Rename后的指令。 RenameQueue中的指令在Commit->tick()中加入到ROB(通过insertInst()加入到InstList的尾部),这虽然不符合硬件逻辑,但Rename模块操作RenameQueue是通过wire(0), Commit模块操作RenameQueue是通过Wire(-1)。所以,在Commit中调用insertInst()并不影响流水线效果,这也简化了软件的实现。这是指令加入ROB的唯一方式。
指令移出ROB¶
在Commit阶段,通过调用retireHead()来将指令移出ROB并完成提交。当然,是否能够移出的判断逻辑是在Commit中做的,具体逻辑可以在Commit章节中看到。这是指令移出ROB的唯一方式。
squash的操作¶
如果发生中断、异常或分支预测失败,那么ROB中的记录当然也需要被刷新。这个过程被成为squash(这似乎是一个业界通用术语)。ROB提供了squash()方法来支持这个功能,值得注意的是**squash()操作只是对指令状态进行标记,将指令标记为Squashed且CanCommit。真正的移出操作仍然是Commit阶段通过判断指令状态调用retireHead()来完成的**。
由于没有基于真实硬件做分析,个人认为,这只是软件的一个讨巧的操作。因为在代码的实现逻辑中,标记指令状态时,由于有squash宽度的限制,可能在一个tick无法完成squash操作,就需要标记ROB为squashing状态,当ROB处于squashing状态时,图中指令9是不会被commit的。
squash()的参数squash_num实际上是指令的一个唯一的seqNum(gem5中通过一个顺序增长的uint64变量为每一条指令分配一个号码,真实硬件也有类似实现吗?)这个seqNum被记录在squashedSeqNum中,这个number标识的指令及其之后加入ROB的指令都会被标记为Squash/CanCommit。
template <class Impl>
void
ROB<Impl>::squash(InstSeqNum squash_num, ThreadID tid)
{
doneSquashing[tid] = false;
squashedSeqNum[tid] = squash_num;
if (!instList[tid].empty()) {
InstIt tail_thread = instList[tid].end();
tail_thread--;
squashIt[tid] = tail_thread;
doSquash(tid);
}
}
template <class Impl>
void
ROB<Impl>::doSquash(ThreadID tid)
{
for (int numSquashed = 0;
numSquashed < squashWidth &&
squashIt[tid] != instList[tid].end() &&
(*squashIt[tid])->seqNum > squashedSeqNum[tid];
++numSquashed)
{
(*squashIt[tid])->setSquashed();
(*squashIt[tid])->setCanCommit();
}
}
如上为截取squash()处理,这里squashIt用来控制squash进度。那么这里有一个疑问,当已经有一个squash发生,但在一个tick中squash没有完成,那么下一个tick会调用doSquash继续进行squash操作。此时如果有新的squash()调用,那么可能上一个tick中的squash操作就浪费掉了,doSquash又会重新进行squash标记。可能会导致squash的周期数与实际硬件不一致,但真是硬件的处理逻辑是怎样的呢?
O3CPU的Commit阶段分析¶
当已经了解TimeBuffer机制,Rename机制及ROB机制之后,再来理解O3CPU的Commit阶段就相对容易了
Commit阶段主要是完成可以提交的指令,从程序员的角度,这表示指令执行的最终完成。
commit阶段数据结构¶
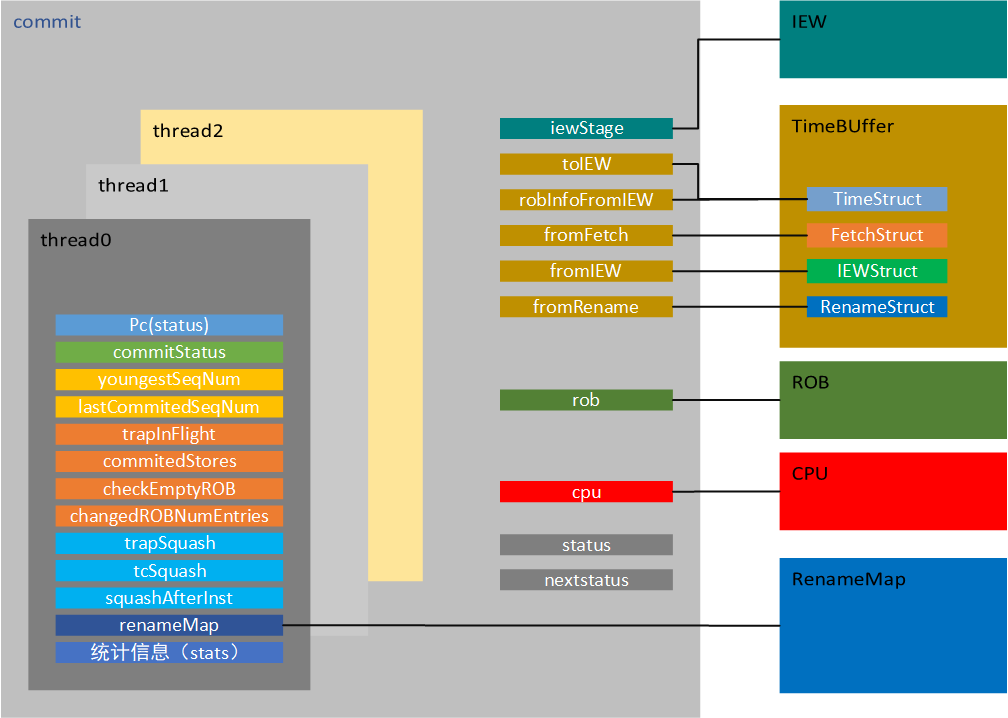
commit内部仍然支持多硬件线程。每个硬件线程都有自己的一些运行状态与计数,commit根据硬件线程调度策略来执行相应的硬件线程,当然,很多时候,硬件线程是并行运行的。
对于单个硬件线程来讲,它包含了trapSquash,tcSquash这样的squash标记,当收到这样的信号之后,会驱动ROB及自身进行squashing操作。
commitStatus标识了该线程在commit阶段的状态,同时通过pc来保存及传递系统pc状态。同时自身还拥有status及nextstatus状态,用来标识自身运行状态。
youngestSeqNum计数和lastCommitedSeqNum计数用来辅助控制ROB的squash操作及提交操作。
同时,还有大量的统计信息用来查看及debug。
commit需要iew阶段的一些状态,通过保留的iewStage指针实现。多个TimeBuffer的wire接口,用来实现与其他模块的数据交互。
ROB模块在commit的控制下运行。
commit阶段流程¶
为了更方便排版,将commit的流程分为了两大部分,一部分包含对squash状态的处理,另一部分包含指令添加到ROB以及指令的提交
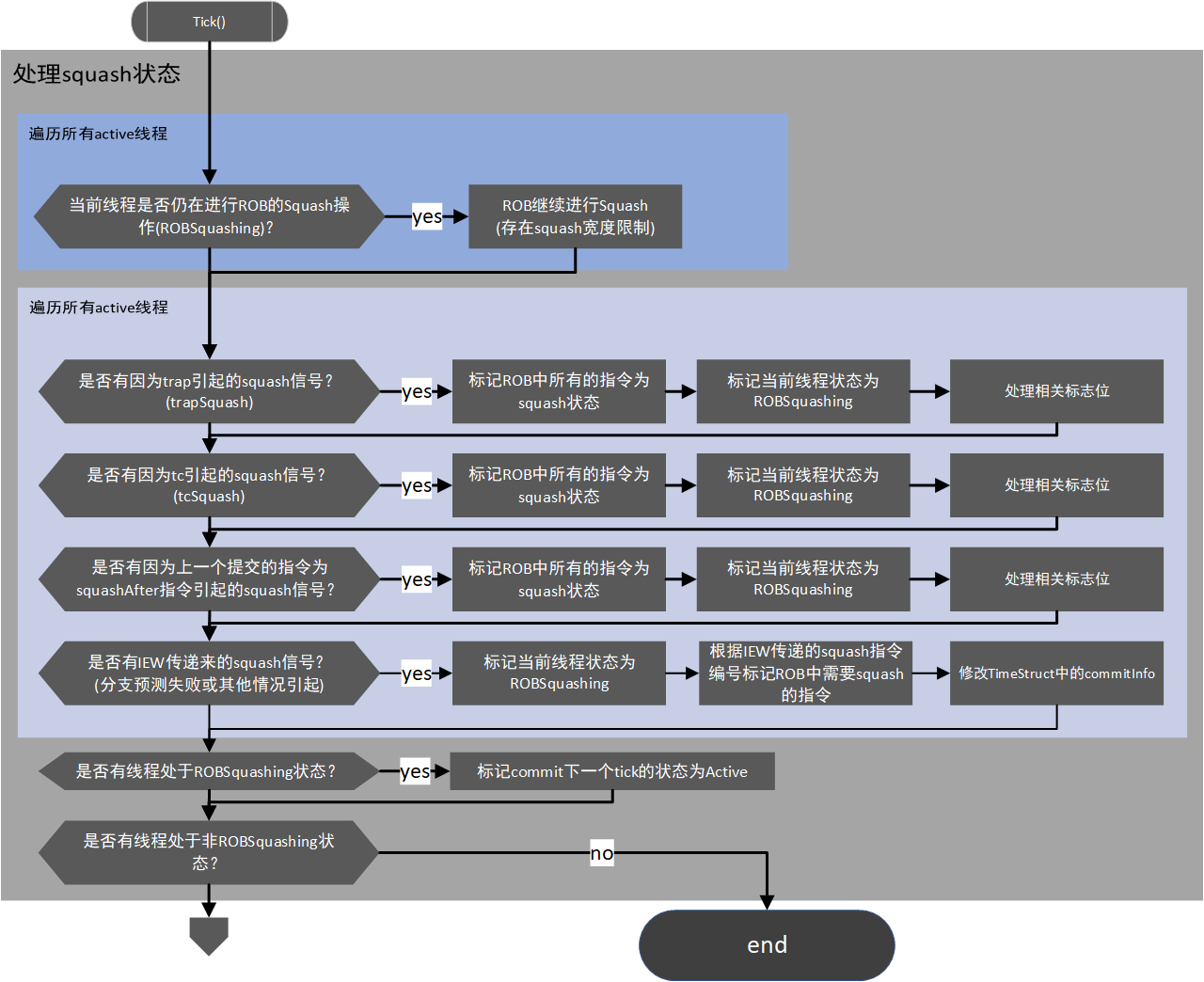 接上
接上
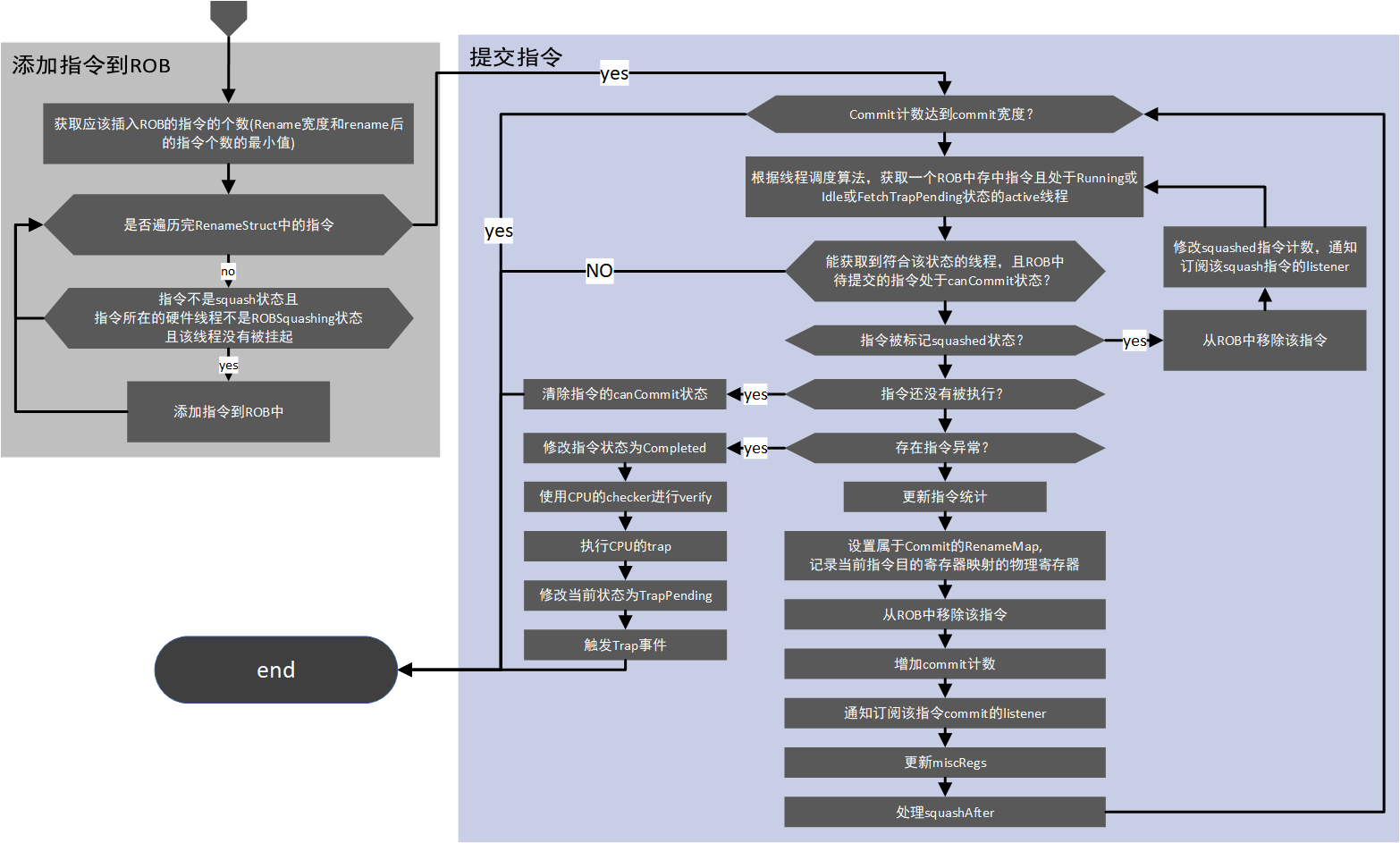
上面的流程图涉及了commit阶段的绝大部分内容,但对于一些微小细节,比如对于store指令的特殊处理,硬件线程的调度策略等,没有涉及。 store指令的提交实际上在LSQ中实现,这会在IEW及LSQ的章节中详细描述。
另外,关于trap的处理,是比较值得关注的细节。为了保持主体流程图能够清晰易懂,这部分细节没有添加到流程图中,这部分更合适在了解 主体流程之后单独理解。下面的几个引用的代码都做了或多或少的特殊处理,包含一些对理解流程更方便的展开、拼凑和删除处理。但完全可以在源代码中找到下面的对应。
DefaultCommit<Impl>::commit()
{
if (cpu->checkInterrupts(cpu->tcBase(0))) {
if (commitStatus[0] == TrapPending || interrupt || trapSquash[0] ||
tcSquash[0] || drainImminent)
return;
interrupt = cpu->getInterrupts();
if (interrupt != NoFault)
toIEW->commitInfo[0].interruptPending = true;
}
}
}
或许将判断中断状态放在commit函数中让人费解,但不必较真。interrupt 保存了更新的中断状态。中断状态的类型是Fault,这也能解释的通,或许他们认为中断可以理解成正常流程中的错误。如果有中断,那么就会通过TimeStruct传递出去。
DefaultCommit<Impl>::getInsts()
{
if (!inst->isSquashed() &&
commitStatus[tid] != ROBSquashing &&
commitStatus[tid] != TrapPending) {
rob->insertInst(inst);
}
}
一但产生TrapPending状态,便不会再向ROB中添加指令,这是挂起的含义之一。那么必然存在一个由interrupt到TrapPending转换,看下面的代码, 在提交指令的处理中,首先对interrupt进行了处理,转换成了TrapPending,并且发送了一个包含 trapSquash[tid] = true的schedule, 延迟为trapLatency,这也就意味着在延迟trapLatency个cycle后,trapSquash被置位,此时再结合前面流程图中讲述的squash处理流程,就能完全理解对于trap是如何进行处理的。当然,提交指令的操作也会被挂起,这也是挂起的含义之一。当然,这部分代码是在可提交线程的查找中处理的。
DefaultCommit<Impl>::commitInsts()
{
// 发送trap
if (interrupt != NoFault) {
commitStatus[0] = TrapPending;
EventFunctionWrapper *trap = new EventFunctionWrapper(
[this, tid]{ trapSquash[tid] = true; },
"Trap", true, Event::CPU_Tick_Pri);
cpu->schedule(trap, cpu->clockEdge(trapLatency));
}
// 挂起也不会再提交指令
if (!rob->isEmpty(tid) &&
(commitStatus[tid] == Running ||
commitStatus[tid] == Idle ||
commitStatus[tid] == FetchTrapPending)) {
bool commit_success = commitHead(head_inst, num_committed);
}
}
tcSquash也是类似的处理,这里不再赘述。